
Navigationssysteme sind nicht sonderlich genau, wenn es um den genauen Standort eines Autos auf seiner Fahrspur geht. Roboterautos brauchen künftig also einen genaueren Orientierungssinn.
Sehen, hören und fühlen das sind die menschlichen Sinne, die beim Autofahren eine Rolle spielen. Das meiste auf der Straße sehen wir: Wenn der Vordermann bremst, wo der Weg um die Kurve führt oder ob die Ampel rot zeigt. Übernimmt künftig der Computer das Steuer, muss er alle Entscheidungen, die der versierte Autofahrer automatisch trifft, in Millisekunden berechnen. Sensoren ersetzen dabei die menschlichen Sinne, aber erst durch das Zusammenspiel mit weiteren Daten von außen und einer intelligenten Software kann sich das Roboterauto künftig zuverlässig orientieren.
Satelliten sind für die Navigation schon lange im Einsatz, vor allem liefern sie per GPS den Autos die eigene Position. Doch größte Herausforderung einer satellitengestützten Positionsbestimmung liegt in der Ungenauigkeit der Daten, meint Zulieferer Bosch: Die Satelliten des Globalen Navigationssatellitensystems (GNSS) fliegen in einer Entfernung von 25.000 Kilometern und mit einer Geschwindigkeit von 4.000 Metern pro Sekunde in ihren Bahnen um die Erde. Ihre Signale werden auf dem Weg ins Auto zum Beispiel durch die Ionosphäre oder Wolkenschichten in der Troposphäre verfälscht.
 Foto: Bosch
Foto: Bosch
Für autonome Fahrzeuge genügt es aber nicht, den eigenen Standort auf wenige Meter genau zu kennen, sie müssen zentimetergenau wissen, wo sie sich befinden. Um das zu erreichen, arbeiten Autohersteller, Zulieferer und andere Technik-Unternehmen an verschiedenen Lösungen, die doch meist eines gemein haben: Die Verknüpfung von vielen Daten zu einer gigantischen, virtuellen und sich ständig aktualisierenden Karte.
Bei Autohersteller Toyota beispielsweise verarbeitet Software-Tochter Triad vorhandenes Satelliten-Material mit Hilfe künstlicher Intelligenz zu hochgenauen Karten, die durch gesammelte Daten von Spezialfahrzeugen, wie sie auch Google für seine Kartendienste nutzt, ergänzt werden. Um die autonome Navigation weiter zu entwickeln, sollen am Computer künftig für jede Straße Millionen von Verkehrsszenarien sich ändernde Witterungsverhältnisse oder absurdes Verkehrsverhalten durchgespielt werden, ebenfalls mit Hilfe künstlicher Intelligenz. Und nicht zuletzt können bald ganz normale Autos auf der Straße die Werte ihrer Sensoren in die Cloud liefern und so genaue Angaben zu der aktuellen Lage auf den Straßen der Welt machen.
Auf eine ganzheitliche Lösung setzt auch Bosch, das dem Roboterauto mit dem sogenannten Bewegungs- und Positionssensor einen neuen Orientierungssinn mitgeben will. Auch hier werden die Satelliten-Signale ergänzt: Zum einen durch Korrekturdaten verschiedener Anbieter. Mithilfe eines Netzwerks von exakt vermessenen Referenzstationen auf der Erde können diese Anbieter die Ungenauigkeiten der GNSS-Positionsinformationen berichtigen. Zum anderen durch Informationen von Raddrehzahlsensoren und Lenkwinkelsensor. Durch sie erkennt der neue Auto-Orientierungssinn, wohin das Auto wie schnell fährt. Die Verarbeitung all dieser Informationen mit intelligenter Software ermöglicht eine sehr exakte Positionsbestimmung, auf die sich ein automatisiertes Fahrzeug im Umfeld von einigen Metern tatsächlich verlassen und auf deren Basis es Entscheidungen über sein Fahrmanöver treffen kann.
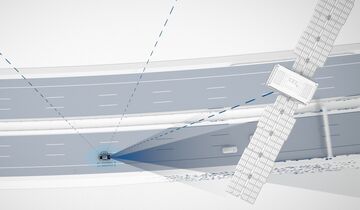 Foto: Bosch
Foto: Bosch
Kombiniert wird die satellitengestützte Orientierung mit einer Lokalisierung anhand von Straßensignaturen. Denn was, wenn die Satellitenverbindung einmal ausfällt? Zunächst berechnet der Bewegungs- und Positionssensor für einige Sekunden die Position des Fahrzeugs abhängig von der letzten bekannten Information weiter. Ist das Satelliten-Signal länger unterbrochen, orientiert sich das Auto mithilfe einer virtuellen Karte, in die die individuelle Straßensignatur eingetragen ist. Radar- und Videosensoren heutiger und künftiger Autos erfassen dafür stationäre Merkmale auf und neben Straßen, wie zum Beispiel Spurmarkierungen, Verkehrsschilder und Leitplanken und übertragen sie in die Cloud. Dort wird die Straßensignatur Bestandteil einer hochgenauen Karte. Automatisierte Fahrzeuge erfassen künftig ihrerseits die Straßenmerkmale und vergleichen, ob die von ihnen erkannten Verkehrsschilder oder Leitplanken mit den in der Karte hinterlegten übereinstimmen. So können sie sich selbst relativ zur Karte zentimetergenau in der Fahrspur lokalisieren.
Eine spezielle Umfeldsignatur will auch der US-Radarspezialist Wave Sense als Leitlinie nutzen. Aber anstatt an der sichtbaren Landschaft, sollen sich autonome Autos an Strukturen im Erdboden orientieren. Dafür strahlt das im Auto installierte Bodenradar rund drei Meter tief in den Untergrund und nimmt Felsen, Straßenbrett und Erdschichten wahr. Sie sollen im ersten Schritt zur Erstellung einer Karte genutzt werden und anschließend zur Positionsbestimmung zum Einsatz kommen. Vorteile des Tiefenradars: Es ist nicht auf gute Sichtbedingungen angewiesen, außerdem ändern sich Strukturen im Erdboden langsamer als beispielsweise die Bebauung am Straßenrand. Ob und wann die ursprünglich fürs Militär gedachte Technik auf die Straße kommt, ist allerdings nicht bekannt.




Bereits testweise im Einsatz sind andere Hilfsmittel, die dem Roboterauto Orientierung bieten. Auf den verschiedenen, deutschlandweit bereits genutzten Testfeldern für das autonome Fahren kommunizieren die Autos mit der Verkehrsinfrastruktur. So kommen zum Beispiel auf den rund 200 Kilometer langen, im Mai eröffneten Teststrecken rund um Karlsruhe, Heilbronn und Bruchsaal neben einer 3D-Karte auch Sensoren zur Echtzeiterfassung von Verkehr und seinen Einflussfaktoren zum Einsatz. Das sogenannte Digitale Testfeld Autobahn auf der A9 in Bayern ist mit Landmarkenschildern ausgestattet. Diese schwarz-weißen Verkehrsschilder haben für den Autofahrer keine Bedeutung, werden aber von autonomen Fahrzeugen erkannt und zur exakten Positionsbestimmung benutzt.
Ähnliche Marker zur Orientierung und Informationsweitergabe hat der amerikanische Technik-Konzern 3M vorgestellt: Mithilfe von versteckten Codes auf Straßenschildern und Fahrbahnmarkierungen sollen sich autonome Autos zurechtfinden. Die maschinenlesbaren Barcodes sind für das menschliche Auge unsichtbar, liefern den Sensoren des Roboterfahrzeugs jedoch Informationen zu Tempolimits, Gefahrenstellen oder Streckensperrungen auf dem jeweiligen Weg. Erste Tests der unsichtbaren Barcodes hat der Konzern in Kooperation mit General Motors und Ford in den USA durchgeführt.
Die zentimetergenaue Routenführung ist also nur noch eine Frage der Zeit wenn auch noch einige Jahre entfernt.









